

CloudCompareFaire un relevé à toujours été une tache compliquée, Je fais un peu mon papi, mais partir relever un bâtiment avec son mètre ruban et un bloc note demande un certain savoir faire.
Avec les mètres laser et les appareils photo numériques, c’était déjà un progrès, mais avec l’arrivée des scan 3d, une nouvelle étape à été franchie. La technologie qui se démocratise est celle du LIDAR (LAser Detection And Ranging). Les données sont disponibles dans un nuage de points ou scan3dReste à tirer des éléments exploitables de ces Go de données.
Les logiciels pro disponibles sur le marché sont soit des outils autodesk (Recap) soit des outils de constructeur de scan : Leïca et Faro (pour ne citer que 2 des gros du marché). Le logiciel Leïca (Cyclone) semble avoir plus de possibilités mais ma société à choisi un scanner Faro car il scanne en couleur. Le logiciel maison, Scene, comme Recap, ne propose que de outils pour assembler les scans, prendre des mesures de distance ou d’angle.
Rein de très enthousiasment.
A noter
si on veut faire passer des nuages dans un projet autodesk, Recap est le seul qui exporte au format .rcp (ou .rcs) qui sont les seuls acceptés par Autocad et Revit.
On obtient facilement des scans de géomètres pour peu qu'on en fait la demande quand on est sur un projet ou un relevé à été fait par ce moyen.
Imaginez que Gimp soit sorti avant photoshop. Et bien c’est ce qui se passe avec CloudCompare. Le soft libre est loin devant la concurrence pro. Vous pouvez donc le télécharger librement ici et faire un dont si vous trouvez que ça en vaut la peine.
Un peut de technique et de format de fichiers
D’un point de vue informatique, les nuages de points sont des photos avec 3 coordonnées de positions au lieu de 2.
Une la palissade ? Il y a un sens plus profond.
Pour un ordinateur il y a 2 façons de mémoriser les données graphiques. Les bitmaps et le vectoriel.
Les bitmaps sont stocké dans des formats de fichiers type .bmp (le 1er format bitmap) .jpg, .tif.(… il y en a des tonnes mais ce n’est pas le sujet) Ce sont des formats de fichiers ''universels'' tous les logiciels savent les lire il n’y a pas de licence à payer pour leur utilisation.
Les formats vectoriels eux sont souvent des formats propriétaires et si des passerelles existe, pour exploiter toute les possibilités d’un .dwg rien ne vaux autocad et il faut payer un logiciel pour y avoir accès.
 Dans un fichier .bmp une image est enregistrée dans la mémoire comme une suite de pixel dans un tableau de données. En ordonnée les X, puis les Y et enfin la couleur. Si on demande à l’affichage de reporter sur l’écran ce tableau à chaque coordonnée un pixel est colorié et l’image apparaît. (si on zoome trop les pixels finissent par devenir de gros carré de couleurs)
Dans un fichier .bmp une image est enregistrée dans la mémoire comme une suite de pixel dans un tableau de données. En ordonnée les X, puis les Y et enfin la couleur. Si on demande à l’affichage de reporter sur l’écran ce tableau à chaque coordonnée un pixel est colorié et l’image apparaît. (si on zoome trop les pixels finissent par devenir de gros carré de couleurs)
Dans un .dwg, on stocke des objets ou entités informatiques dans un plan virtuel. Avec 2 points et la ‘’fonction’’ droite, on demande à l’affichage de calculer les pixels à allumer pour représenter une droite. (on peut zoomer à l’infini, pas de pixels)
Les scans 3d sont comme les images Un tableau de données à 3 dimensions + une composante couleur, aussi, quand on veux exploiter des nuages dans Autocad, on se retrouve confronté aux même problèmes d’échange de données que quand on veux travailler avec des images.
Dans une image (typiquement un plan scanné qu’on doit retracer), il y a toujours du bruit des déformations, on ne peut pas s’accrocher dessus (pas de snap aux pixels dans totocad). Si on cherche à le vectoriser on a un rendu tremblotant. Et la technique la plus sure consiste à retracer par-dessus l’image avec des entités autocad. On peut aussi de se servir de l’image comme fond de plan en la retravaillant sous photoshop pour effacer les démols.
Avec les scans 3d on retrouve les mêmes soucis, la 3d en plus. De ce point de vue, exploiter des données de scans 3d va nous demander de récupérer des images les plus propres possibles pour retracer dessus. CloudCompare offre tous les outils pour le faire et plus encore. Les scans 3d existent dans les milieux pro depuis les années 2010. Ils existaient en laboratoire depuis les années 70. Il est donc surprenant que les logiciels proposés par les constructeurs soit si limités en fonctionnalités.
Développé initialement par un Français (cocorico !) CloudCompare est distribué sous licence Open Software. Il a su fédérer une communauté de développeurs et s’il y a en standard une traduction partielle des menus (affichage/language) il garde pas mal de termes en anglais (je n’ai trouvé que des tutos en anglais). Rendons donc hommage à Daniel Girardeau-Montaut dont c’était le sujet de thèse en 2003.
N’étant pas propriétaire et exploitant des données ‘’bitmap’’ CloudCompare n’a pas vraiment de format de fichier propre Pour les nuages de points on va travailler des .e57 du Jpeg ou du .png voir tiff pour les images. A noter une passerelle en .dxf pour soit importer des polylignes 3d soit en exporter. Des formats de maillage (Mesh en anglais) les .ply semble les plus rependu mais pas compatible autocad.
En fait si, si on sélectionne toutes les entités de l'arbre (ctrl A) la commande sauver propose le format .bin qui permet de sauver un environnement de travail complet, nuage caméra et polylignes comprise. Mais c’est plus un container qu’un format de fichier normalisé.
Encore un poil de théorie, Documents de travail.
Un relevé Lidar est composé de plusieurs scans réalignés grâce au recouvrement de zones communes. La même information (un point) est donc enregistrée plusieurs fois. La densité des points est variable en fonction de la position du scanner. On se retrouve avec des relevés bruts de plusieurs Go et ça met à genoux les cartes graphiques de la plus part des PC. Généralement les géomètres fournissent les données brutes. La première chose à faire, une fois le scan brut réceptionné c’est de le consolider dans un fichier qu’on va ré-échantillonner pour ne conserver qu’une densité de points suffisante tout en ayant un confort de travail acceptable.
Sur mon ordi du moment (portable I7 16go GTX 1060) un nuage de 20M à 50M de points passe sans trop de problèmes et les temps de calcul des opérations sont raisonnables.
Pour qu’un relevé de bâtiment 2 étages sur 15x25m rentre dans cette maille il faut un nuage avec 1 pts tous les cm. Pour ceux qui voudraient manipuler et qui n'ont pas de données à disposition,
je pose un lien vers un exemple ici.
C'est avec ce fichier que j'ai noté quelques exemples d'utilisation.
Le scan brut fait 2.4Go, ce document 260mo. Bien sur, si on veut gagner en précision, on peut toujours revenir au scan d’origine, mais on va voir qu’avec ça on peu déjà sortir des données exploitables.
Manip de base, Navigation, déplacement simples
Chargez le fichier d’exemple pour jouer avec le soft. C'est comme en voiture on ne connait la route et sait retourner sur un lieu que c'est c'est nous qui conduisons pour y aller.
Je récapitule et creuse parfois un peut, mais je vous invite a regarder cette vidéo qui dont ces notes sont tirées.
Interface
__L'arbre du projet
En gros, la gauche de l’interface est occupée par une arborescence ou sont répertoriés les objets présents dans le projet.
Tout objet de cette arborescence est sauvegardable indépendamment dans un des formats dédié.
Cette arborescence fait aussi office de pilotage de la visibilité des éléments suivant s'il sont coché ou pas
Dessous des infos sur l’entité sélectionnée
Les fonctions qui agissent sur les entités disposé autour de la zone d’affichage ne sont disponibles que si un objet est sélectionné.
Il faut donc sélectionner avant de lancer une commande.
__La zone graphique
Un cliquer glissé déclenche une sorte de tracball qui oriente la vue dont on peut facilement redéfinir le point de rotation, le clic droite c’est pour un déplacement panoramique la roulette pour le zoom
-A noter le raccourci L
qui bloque la rotation qu’autour des Z. Pratique pour tourner autour des choses sans se balader en Z et en gardant l'horizontale
On a accès à d'autre fonctions suivant la commande active, mais par défaut c'est la navigation
__Point de vue / caméra
on passe facilement de l’ortho à une caméra de cinéma. La caméra avec point de fuite met dans l’ambiance, les vues ortho vont servir à sortir des vues en plan ou des façades sans déformations
On peu sauver des caméras et même faire des vidéos grâce à un plug-in fourni en standard.
On le vera plus loin, mais cette fenetre est la fenetre de ''rendu'' il suffit de sauver avec Affichage/enregistrer le rendu et tout ce qui est dans le fenetre graphique est exporté en image.

- les paramètres d'affichage et de caméra Ctrl V pour sauver le point de vue (affichage / Save vieuport as object)
A Noter
--J'ai modifié les paramètres d'affichage pour avoir un fond blanc afin de sortir des images avec cet arrière plan. - Le centre de rotation du point de vue auto (au centre de l'écran) ou par un point à cliquer.
- vue perspective ou droite
- Arbre du projet avec l'objet sélectionné, sa coche de visibilité et sa bonding box en vue graphique
- Propriété de l'objet sélectionné à noter sa couche rvb qui est affichée contient en fait des donnée noir et blanc, l'objet contient 18M de points.
- Une zone de dialogue incompréenssible (pour l'instant)
- Ouvrir et enregistrer ce qui est sélectionné dans l'arbre
- Poser des points des cotes..
- Dupliquer fusionner ou suprimer une entité.
- Rééchantionner un nuage
- Zone de coupe, déplacer tourner, boites de section, coupes vectorisées
c'est avec cette fonction qu'on va pouvoir sauver des polylignes exportables en DXF
Déplacer tourner est un peut space... voir ici
- Zone des Plug-in, celui la recalcule un rendu de lumière qui peut aider à la visibilité
Une vue en plan vite fait?
J’ai pris le parti de ne pas chercher à vectoriser pour passer des éléments vers autocad mais de passer par les images, comme si je bossais à partir de scans de plans 2d. Le but est de produire des vues en plan pour servir soit pour imprimer pour faire des esquisses à la main soit pour retracer sur autocad soit sur Revit. On va donc sortir un jpeg, La projection ortho étant parfaite on aura donc aucune déformation.
Une vidéo en anglais d'une manip similaire m'a inspirer la technique ici
ATTENTION Il faut avoir changé les paramettres d'affichage (1) de l'interface pour avoir un fond blanc !
Pour sortir un plan du Rdc sur ce scan avec étage il faut commencer par trier une zone coupée à peu près sous le linteau des fenêtres pour le dessus et dans l’épaisseur du plancher en limite basse pour ne pas voir le plafond des caves. Si vous avez suivi la vidéo des Basics, vous ne devriez pas avoir de mal à trier une zone qui ressemble à ça. Un indice c'est l'outil boite de section noté coupe transversale qui permet de dupliquer un étage pour travailler dessus. (il faut biensur se mettre en vue de coté pour bien s'ajuster) ---Un petit truc en vue de dessus Le mieux c'est de l'importer depuis autocad en créant un .dxf j'explique tout ça plus bas
|
_ |  |
 |
On se met en vue de dessus sans pers et on cadre sur la zone à imprimer en jpeg. On sélectionne la section d'étage, puis Editer/Couleurs/set unique, on met tout en noir Mouai… c’est moche... |
|
Affichage/enregistrer le rendu 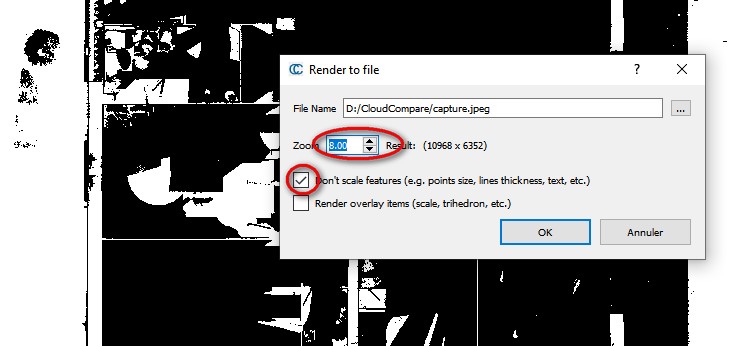
Attention l'image originale fait 11mo C'est déja mieux non? --A noter |
|
|
 |
Cette image est à passer dans photoshop pour la réduire en taille (3 ou 4000 pts sont suffisant pour bosser). Et les filtres photoshop passe mieux une fois les points un peu mélangés en nuances de gris Dans photoshop, on peut se servir des courbes pour accentuer des zones trop pale ou au contraire éclaircir les sols on arrive en 2/2 a ce résultat Rappel: Courbe pour accentuer les détails à faire en premier sur les zones peu visibles
Courbe pour éclaircir le sol tout en gardant les murs noirs
|



Bien sur, il reste des cotes à prendre, on perd en précision avec les filtres, mais ça aide déja pas mal pour bosser vite fait. On conserve suffisament de détails pour retracer avec une précision de l'ordre du cm ce qui est mieux que tout ce que j'ai jamais fait avec mon mètre et mon carnet à spirale
